Proactive Safe Human-Robot Interaction
Overview:
As robots become more common in industrial manufacturing, social, and home environments, it is imperative that they seamlessly and safely collaborate with humans. This would allow us to take advantage of the speed and precision of robots as well as the flexibility of humans for completing tasks.
In this project, we aim to enable robots with two capabilities. First, to proactively collaborate with humans instead of passively reacting to the human's actions, and second to stay safe around the human while accounting for multiple possible intentions the human may have.
Proactive Decision Making Around Humans
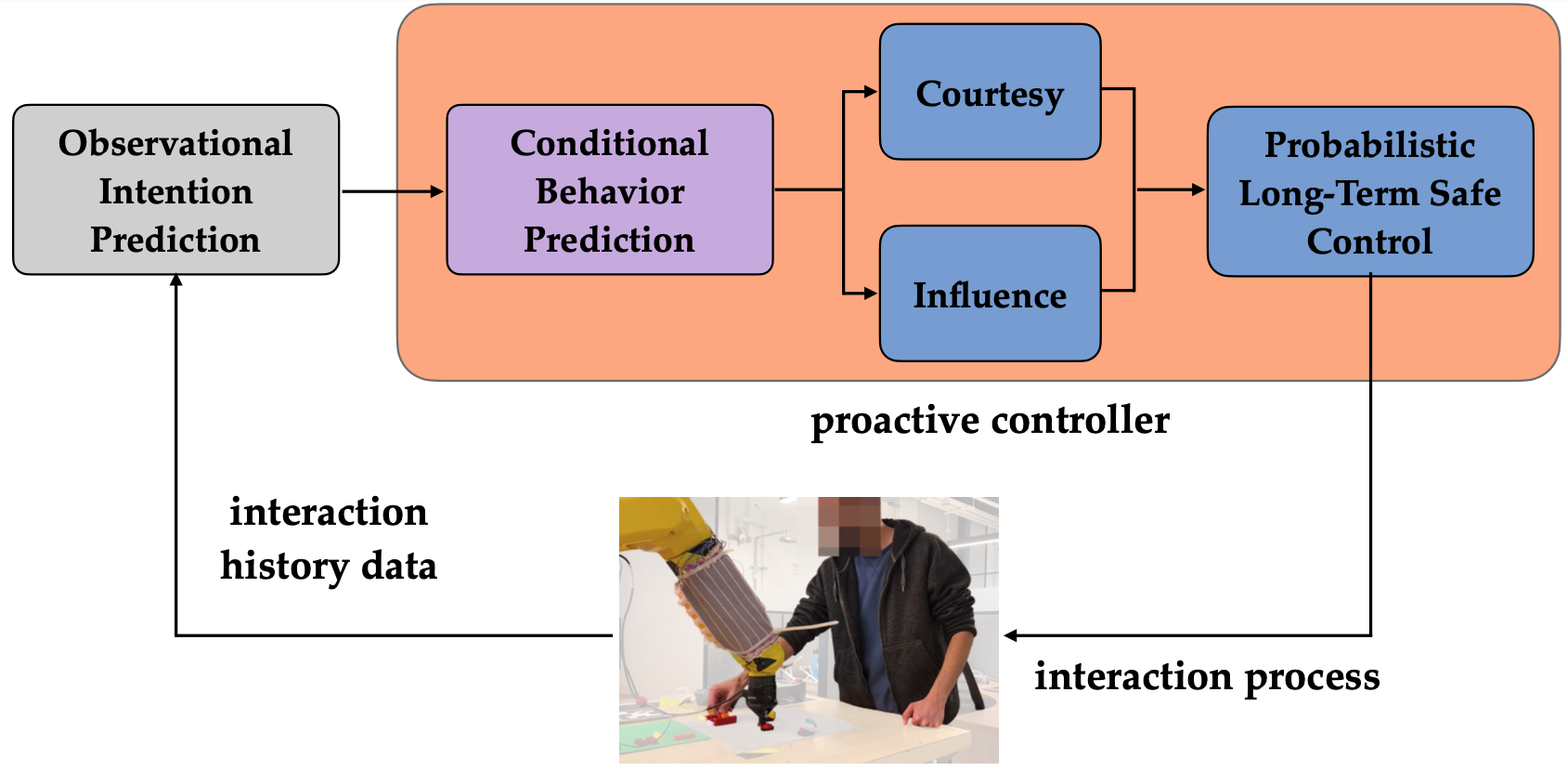
In this line of work, we focus on enabling a robot to condition its predictions of the human's actions on its own plan. This allows the robot to choose a plan that proactively considers the human's future reaction. The model we propose in this work, called Model-Based Conditional Behavior Prediction, ultimately enables the robot to either influence the human collaborator towards more efficient goals, or automatically switch to staying out of the human's way if they are not influenceable. In a user study, people tend to prefer interacting with our proactive controller in a collaborative goal-reaching task.
Multimodal Safe Control Around Humans
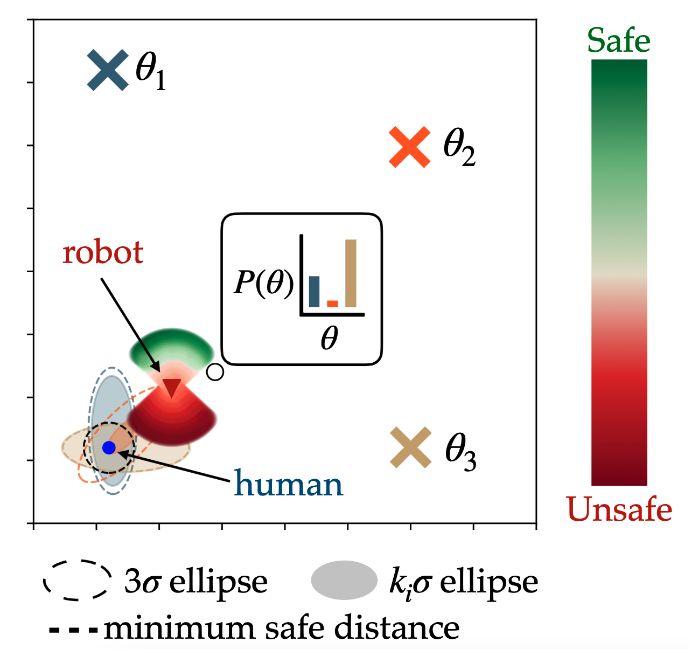
On top of being able to predict the human collaborator's future intentions, we need a method that can still stay safe around the human when we are uncertain about their intentions. In this work, we introduce a modification to the Safe Set Algorithm (SSA) that is compatible with keeping a Guassian Mixture Model (GMM) as the uncertainty model of the human. This means the robot is both uncertain about what the human's goal is and how they will move to reach that goal. Our proposed method,called the Multimodal Safe Set Algorithm (MMSSA), guarantees safety up to a desired probability without making the robot overly conservative.
Publications:
-
[C72] Towards Proactive Safe Human-Robot Collaborations via Data-Efficient Conditional Behavior Prediction
Ravi Pandya, Zhuoyuan Wang, Yorie Nakahira and Changliu Liu
IEEE International Conference on Robotics and Automation, 2024
-
[C66] Multimodal Safe Control for Human-Robot Interaction
Ravi Pandya, Tianhao Wei and Changliu Liu
American Control Conference, 2024
Sponsor: CMU Manufacturing Futures Institute
Period of Performance: 2022 ~ 2023
Point of Contact: Ravi Pandya