Humanoid Robots: Safety and Dexterity
Overview:
Research Topics
Humanoid Safety
SPARK: Safe Protective and Assistive Robot Kit
Publications:
-
[C101] SPARK: Safe Protective and Assistive Robot Kit
Yifan Sun, Rui Chen, Kai S Yun, Yikuan Fang, Sebin Jung, Feihan Li, Bowei Li, Weiye Zhao and Changliu Liu
IFAC Symposium on Robotics, 2025
Application of dexterous safe control for humanoids in cluttered environments
Publications:
-
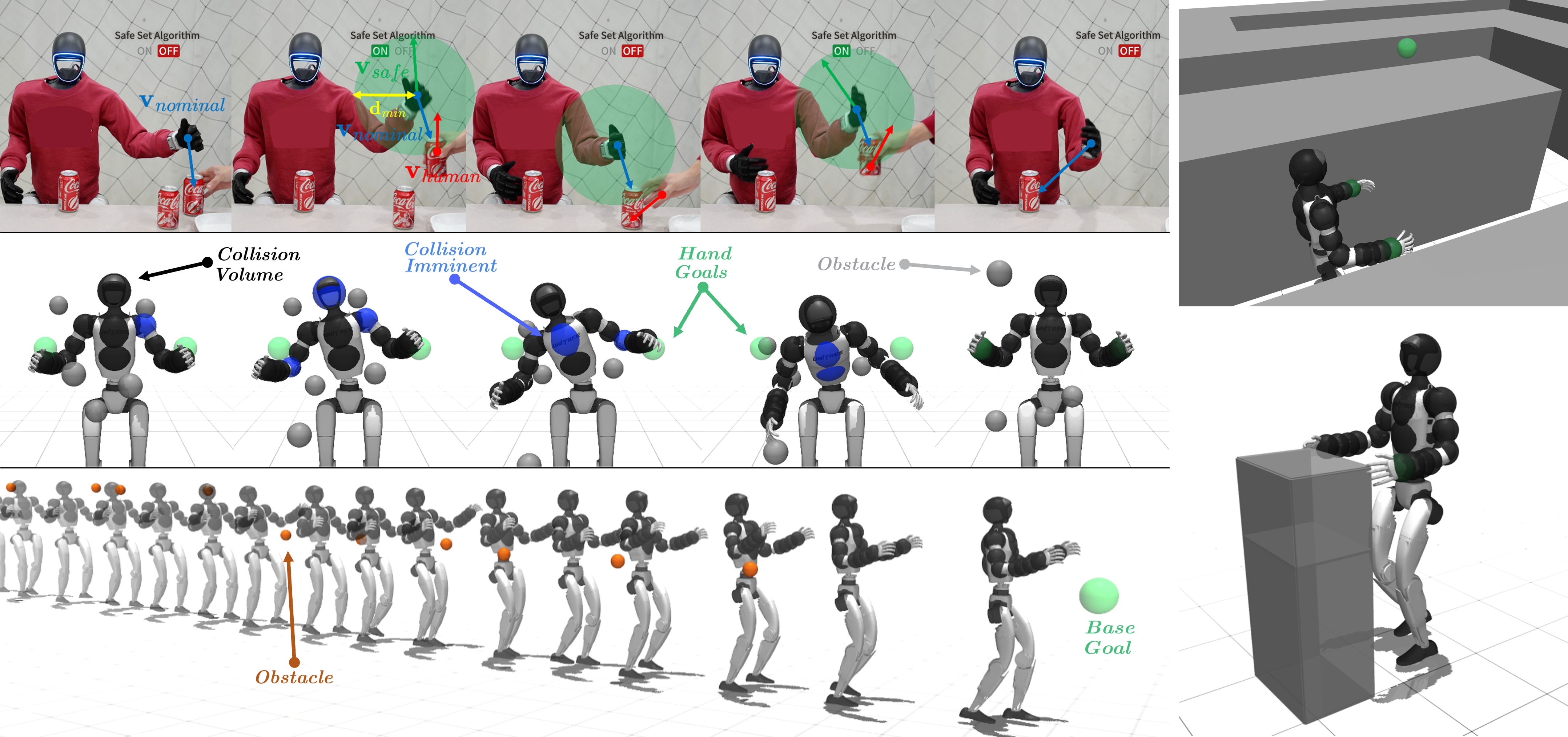
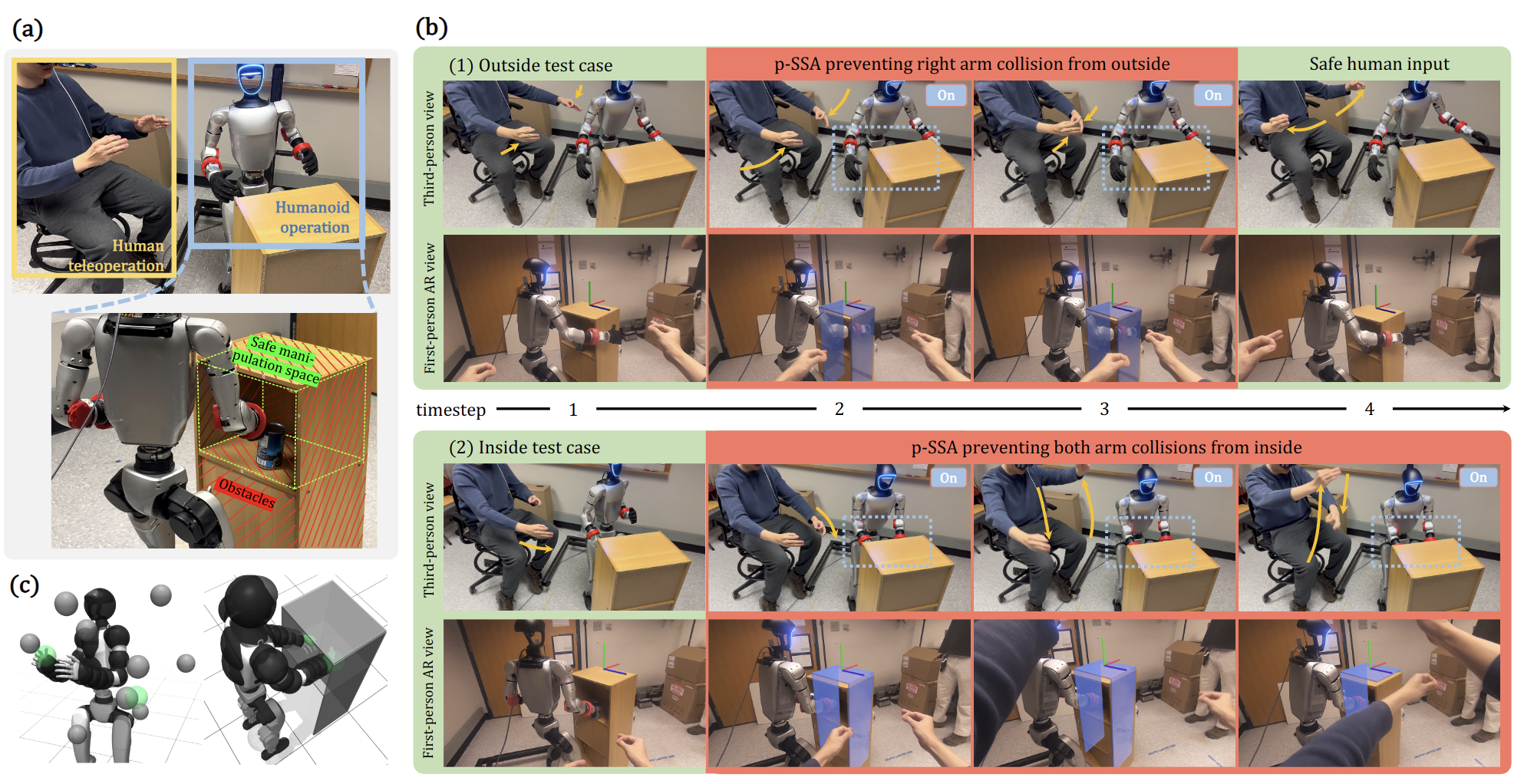
[U] Dexterous Safe Control for Humanoids in Cluttered Environments via Projected Safe Set Algorithm
Rui Chen, Yifan Sun and Changliu Liu
arXiv preprint arXiv:2502.02858, 2025
Model Based Whole Body Control
Incremental Koopman Algorithm for Humanoid Robots
Publications:
-
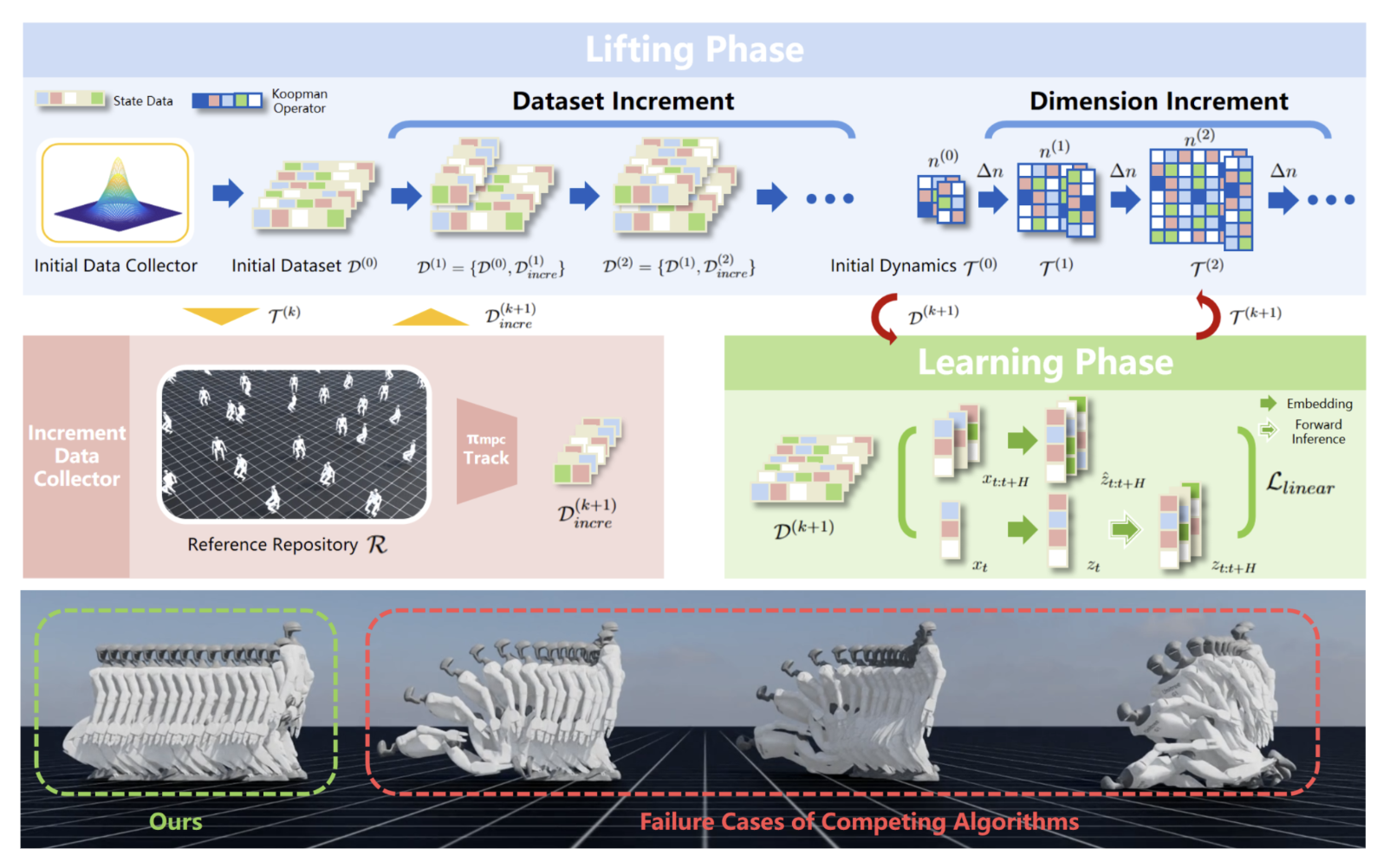
[C95] Continual Learning and Lifting of Koopman Dynamics for Linear Control of Legged Robots
Feihan Li, Abulikemu Abuduweili, Yifan Sun, Rui Chen, Weiye Zhao and Changliu Liu
Learning for Dynamics and Control Conference, 2025
Human-to-Humanoid
The Human-to-Humanoid (H2O) line of work focuses on enabling real-time whole-body teleoperation and autonomous control of full-sized humanoid robots using reinforcement learning (RL). This research introduces scalable methods for retargeting human motion to humanoids, leveraging privileged motion imitation and a sim-to-real pipeline for robust policy learning. Key advancements include:
- H2O Framework: Uses an RGB camera to enable real-time humanoid teleoperation through an RL-based motion imitator, allowing dynamic whole-body movements such as walking, jumping, and boxing in real-world scenarios.
- OmniH2O System: Expands teleoperation to include multiple control interfaces (VR, voice, RGB camera) and integrates with AI models like GPT-4 for autonomous task execution. This system demonstrates dexterity in activities such as sports, object manipulation, and human interaction.
- Dataset and Learning Pipeline: Introduces OmniH2O-6, the first dataset for humanoid whole-body control, supporting learning from teleoperated demonstrations and enabling robust, real-world deployable policies with minimal sensor input.
This research represents a significant step toward intelligent humanoid systems capable of human-like motion and autonomous decision-making in diverse environments.
Publications:
-
[C79] Learning Human-to-Humanoid Real-Time Whole-Body Teleoperation
Tairan He, Zhengyi Luo, Wenli Xiao, Chong Zhang, Kris Kitani, Changliu Liu and Guanya Shi
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
-
[C82] OmniH2O: Universal and Dexterous Human-to-Humanoid Whole-Body Teleoperation and Learning
Tairan He, Zhengyi Luo, Xialin He, Wenli Xiao, Chong Zhang, Weinan Zhang, Kris Kitani, Changliu Liu and Guanya Shi
Conference on Robot Learning, 2024
Versatile Whole-Body Control
Advancing humanoid whole-body control requires overcoming challenges in task versatility and sim-to-real transfer. Two key contributions address these challenges:
-
HOVER (Humanoid Versatile Controller): Introduces a multi-mode policy distillation framework that unifies various control modes—such as navigation, loco-manipulation, and tabletop tasks—under a single kinematic motion imitation policy. This approach eliminates the need for training separate policies for each mode, enabling seamless transitions and improving efficiency for real-world humanoid applications.
-
ASAP (Aligning Simulation and Real-World Physics): Tackles the dynamics mismatch between simulation and reality by implementing a two-stage framework. ASAP first pre-trains motion tracking policies in simulation using retargeted human motion data. Then, it refines real-world deployment through a delta action model that compensates for discrepancies. This method significantly enhances agility and coordination, surpassing traditional system identification and domain randomization techniques in achieving dynamic, expressive humanoid motions.
Together, these contributions enhance humanoid adaptability and agility, paving the way for more robust and human-like robotic capabilities across diverse real-world tasks.
Publications:
-
[C88] HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots
Tairan He, Wenli Xiao, Toru Lin, Zhengyi Luo, Zhenjia Xu, Zhenyu Jiang, Changliu Liu, Guanya Shi, Xiaolong Wang, Linxi Fan and Yuke Zhu
IEEE International Conference on Robotics and Automation, 2025
Period of Performance: 2023 ~ Now